|
MYNT EYE SDK
v1.8
https://www.slightech.com/camera
|


|
|
MYNT EYE SDK
v1.8
https://www.slightech.com/camera
|
|
The SDK could be installed to a arbitrary location. Just run the install script under the SDK directory.
The SDK files contain following directories:
Please read the README file or the Getting Started section to get started with application development.
IMU has 3-axis accelerometer and 3-axis gyroscope to detect linear acceleration and rotational rate.
IMU sampling rate is 250 Hz.
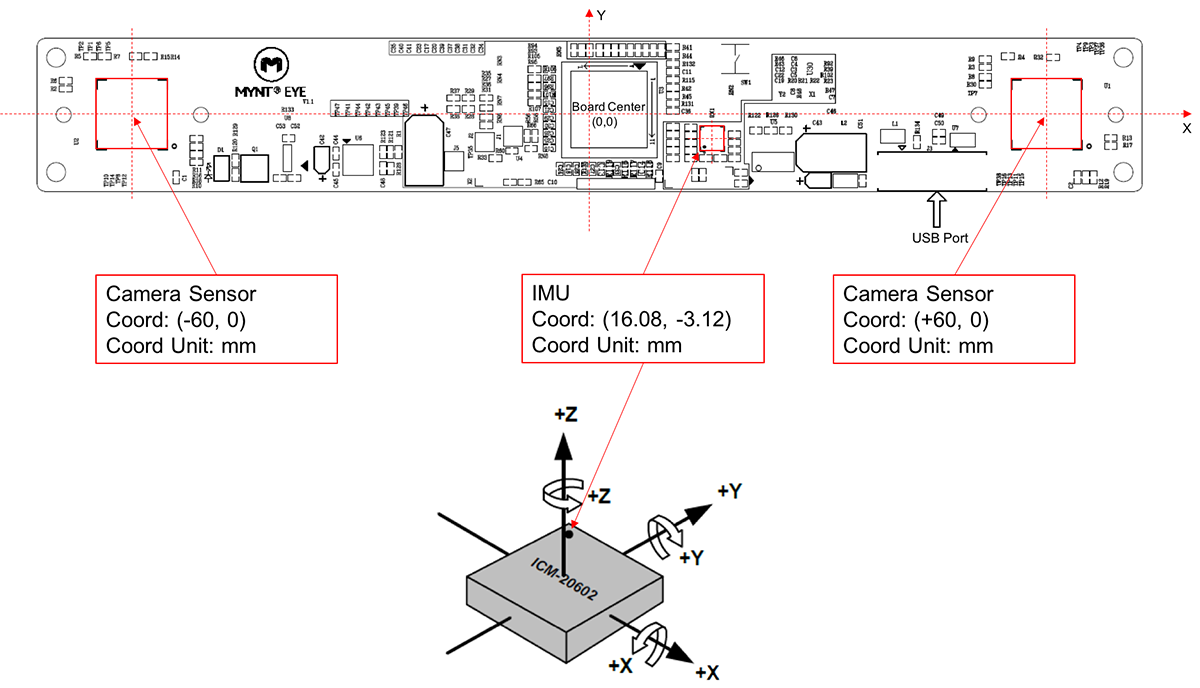
Right-handed coordinate system, RUB (right-up-back).
IMU Rotation matrix (rotate 90° around the z-axis):
[0, -1, 0, 1, 0, 0, 0, 0, 1]
Translation vector from camera to IMU (in meter):
| Translation | |
|---|---|
| Camera Left | [ 0.07608, -0.00312, -0.01464] |
| Camera Right | [-0.04392, -0.00312, -0.01464] |
The value of z-axis is from the center of the lens to the board. The deviation maybe ±0.25mm because of the difference in focal length.
| Noise Density | Random Walk | |
|---|---|---|
| Accelerometer | 7.6509e-02 | 5.3271e-02 |
| Gyroscope | 9.0086e-03 | 5.5379e-05 |
3D models are stored in
3dmodeldirectory of our online disks: Google Drive, 百度网盘.
 1.8.14
1.8.14