When using MYNT EYE camera first time, the SDK will download a calibration file for this camera to "settings/SN*.conf".
Besides, the SDK also provides a stereo_calib tool to help calibrate camera with OpenCV by yourself.
stereo_calib
$ cd $MYNTEYE_SDK_ROOT
$ ./tools/stereo_calib -help
Stereo calibration with square chessboard.
Calibrate the stereo camera and display rectified results along with the computed disparity images.
Chessboard pattern which has a size of 9 X 6: http://docs.opencv.org/master/pattern.png.
Usage:
./stereo_calib -w=9 -h=6 -s=1.0 [-nr] [-n=12 -i=1] <image list>
Options:
Default Description
-help show help message
-w=<board_width> 9 number of inner corners per a chessboard row
-h=<board_height> 6 number of inner corners per a chessboard column
-s=<square_size> 1.0 the square side length in real measurement
scale the vectors of the calibration pattern points
-nr not display rectified results
-n=<image_number> 0 capture images manually if greater then 0
stored into `./images` directory
-i=<device_index> 0 device index, but default is MYNTEYE on Windows
`./tools/list_devices` to see indexes on Linux/Mac
<image list> ./stereo_calib.xml given images in a XML/YML file
Calibration
- Prepare a calibration board with square chessboard.
- Could print a chessboard pattern and paste it on a board which had better be flat and hard.
- Plug the camera in a USB 3.0 port.
- Run
stereo_calib to calibrate camera. ```
# Manually capture `12` images of device `1`, then calibrate.
$ ./tools/stereo_calib -w=9 -h=6 -s=25 -n=12 -i=1
# Using captured images in `images/imagelist.yaml` to calibrate.
$ ./tools/stereo_calib -w=9 -h=6 -s=25 images/imagelist.yaml
```
- If not sure which index is MYNT EYE, you could run
./tools/list_devices.
- If not
-nr option, you will preview rectified results after calibration done.
- Press
space to next or esc to exit.
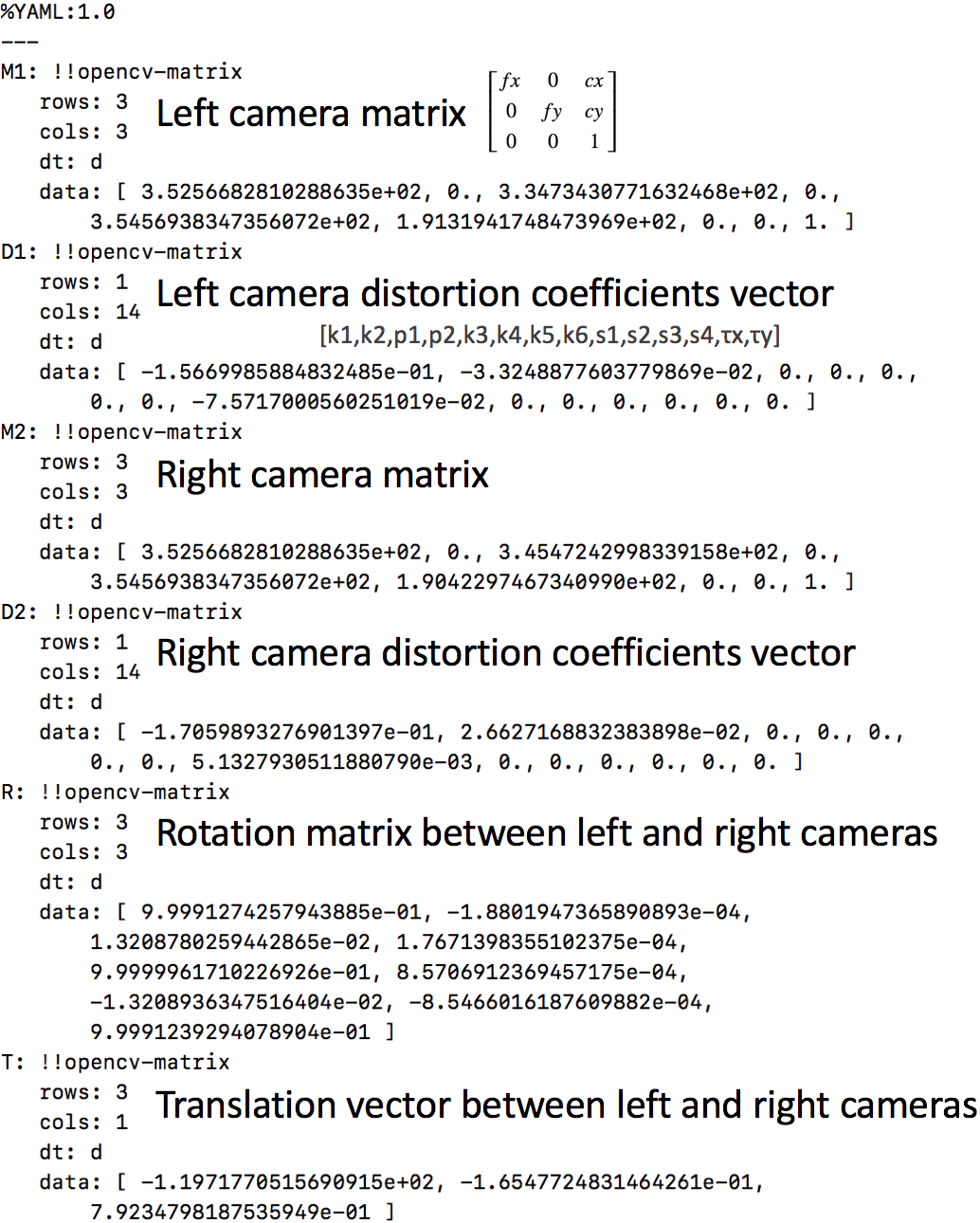
- The calibration file will be saved to "<MYNTEYE_SDK_ROOT>/settings/SN*.conf".
SN*.conf
References


 1.8.14
1.8.14